Article of the Month -
October 2005
|
New Global Navigation Satellite System Developments and
Their Impact on Survey Service Providers and Surveyors
Chris RIZOS, Matthew B. HIGGINS and S. HEWITSON
 This article in .pdf-format
This article in .pdf-format
1)
This article is
based on a paper in Proceedings of SSC2005 Spatial Intelligence, Innovation
and Praxis: The national biennial Conference of the Spatial Sciences
Institute, September 2005. Melbourne: Spatial Sciences Institute. ISBN
0-9581366-2-9
Key words: Galileo, Global Navigation Satellite Systems, GLONASS,
GNSS, GPS.
SUMMARY
The surveying and mapping industry has been revolutionised by the use of
Global Navigation Satellite Systems (GNSS), involving satellites, ground
reference station infrastructure and user equipment to determine positions
around the world. The Global Positioning System (GPS) from the USA is the
best known, and currently fully operational, GNSS. Russia also operates its
own GNSS called GLONASS. Fuelling growth in the coming decade will be next
generation GNSS, and space augmentations of these that are currently being
developed. The USA is modernizing GPS, Russia is revitalising GLONASS, and
Europe is moving ahead with its own Galileo system. Watershed advances in a
major technology like GNSS only occur in 20 to 30 year cycles. Therefore it
is now an opportune time to explore potential opportunities and issues for
the spatial information industry.
The first part of the paper outlines how the next generation of GNSS will
bring extra satellites and signals to deliver better accuracy, reliability
and availability. Extra satellites will make possible improved performance
for all applications, and especially where satellite signals can be
obscured, such as in urban canyons, under tree canopies or in open-cut
mines. In its various modes, modernized GNSS will also deliver higher
accuracy and improved speed-to-first-fix for carrier phase-based
positioning. For example, the European Union's (EU) Galileo system will
offer a Commercial Service that will be capable of delivering 0.1m accuracy
without a direct link between the user and ground reference stations. The
extra satellites and signals will improve the performance and reliability
for all applications right down to the centimetre accuracy techniques used
in surveying and geodesy.
The second part of the paper looks at some of the implications of these
improvements for the service providers of continuously operating reference
stations (CORS), as well as for survey users. For example, the EU's Galileo
system is much more open to civilian and commercial involvement, and allows
for regional and local augmentation to the core system. How will current
CORS infrastructure be able to cope providing differential positioning
services to users tracking a combination of GPS, Galileo and perhaps GLONASS
signals? What is the benefit of the modernized GPS L2C signal? Will mixed
GPS/Galileo RTK services be possible?
1. INTRODUCTION
Global Navigation Satellite Systems (GNSS) involve satellites, ground
stations and user equipment to determine positions around the world and are
now used across many areas of society. Among currently used GNSS, the Global
Positioning System (GPS) from the USA is the best known, and currently fully
operational, GNSS. Russia also operates its own GNSS called GLONASS.
A European Commission report claimed that the GNSS industry in 2001 had a
global turnover (equipment and applications) of 15 billion Euros. The report
forecasts this to rise to 140 billion Euros by 2015. It also identifies
North America, Europe and the Pacific Rim as the dominant markets for the
next 5 years.
Fuelling growth during the next decade will be next generation GNSS that
are currently being developed. Major components are the USA’s modernized GPS
and Europe’s planned Galileo system. Watershed advances in a major
technology like GNSS only occur in 20 to 30 year cycles, therefore this is
an opportune time to explore potential opportunities and issues for the
spatial information industry.
2. THE GLOBAL POSITIONING SYSTEM
2.1 The Current GPS
The most widely used current system is the Global Positioning System
(GPS). The current constellation of 29 satellites (see
http://www.navcen.uscg.gov/gps/)
operate without a hitch and civilian applications of GPS are now considered
to be quite mature. For a detailed description of the current GPS see UN
Action Team on GNSS [2004]. While it is beyond the scope of this paper to
provide detailed review material, the following points are of relevance for
later discussions:
- GPS broadcasts two signals in the so-called L1 and L2 bands: L1 at
1575.42MHz and L2 at 1227.60MHz.
- GPS receivers can make pseudorange or carrier phase
measurements, on the tracked L1 or L2 signals.
- Civilians using low-cost receivers only have direct access to the L1
signal, using the so-called Course Acquisition Code (C/A-code).
This means that such receivers are unable to correct for delays to the
signal as it passes through the ionosphere, which is now the dominant
cause of error for users.
- PPS receivers can access the ranging code (the Precise or P-code,
now encrypted as the Y-code under a policy of Anti-Spoofing) on both the
L1 and L2 signals, which enable them to correct for ionospheric errors.
- GPS provides two levels of service:
- Civilian users have access to the Standard Positioning Service
(SPS), whereby the C/A-code allows direct L1 measurements to be made.
Specifying the accuracy of the SPS depends on many factors. Recent
testing has shown that typically available accuracy from the SPS is
often less than 10m. However, it should be noted that the officially
stated standard for worst case horizontal positions using the SPS and
based only on the signals in space (ie ignoring local conditions) is
less than or equal to 22m at the 95% confidence level. The equivalent
value in height is less than or equal to 77m.
- The Precise Positioning Service (PPS) enables enhanced
accuracy and availability that is not available to civilian users by
permitting the direct measurement of pseudorange on both the L1 and L2
signals using the Y-code. It is designed for the US and allied military,
and for certain authorised US agencies.
For the spatial industry, applications can be classified according to the
achievable accuracy:
- Single Point Positioning (SPP) is the technique for which GPS
was originally designed and delivers the SPS performance mentioned above.
- Differential GPS (DGPS) can overcome some of the limitations of
GPS by applying corrections to the basic pseudorange measurements, based
on a receiver making measurements at a known point (a reference station).
The accuracy achievable from DGPS can range from a few metres down to few
decimetres, depending on the quality of the receiver and the DGPS
technique used.
- GNSS Surveying also works differentially but can achieve
centimetre accuracy using a special measurement technique. A typical
receiver, for both SPP and DGPS, measure the ranges to the satellites by
timing how long the signal takes to come from the satellite (the
pseudorange, referred to as such because this measurement is
contaminated by the receiver clock error). However, receivers used in
surveying and geodesy measure the phase of the underlying carrier wave
signal (the so-called carrier phase). For baselines between points
separated by more than (say) 20km, it is important that such receivers can
also correct for the ionosphere. Given that civilian users only have
access to the SPS, surveying receivers employ sophisticated signal
processing techniques to measure the phase of L2 signal. This level of
sophistication is a major reason why surveying receivers are more
expensive than receivers used for SPP and DGPS.
2.2 GPS Modernization
The USA has embarked on a program of GPS Modernization to provide
better accuracy and more powerful and secure signals from future GPS
satellites. Again, it is not within the scope of this document to describe
this program in detail; see US Coast Guard Navigation Center [2005]. While
there are various improvements planned, the important issues to note for
this paper revolve around extra signals to be broadcast by future GPS
satellites:
- It is intended to introduce an improved code (instead of the current
C/A-code) on the L2 frequency of GPS (the so-called L2C) to enable
civilian receivers to better account for ionospheric error, as well as to
be more immune to RF interference and multipath. The first Block IIR-M
satellite to broadcast L2C was launched at the time of writing this paper
(October 2005). The launch schedule to replace existing satellites is
difficult to predict but full operational capability for L2C will not be
until all 24 satellites (a combination of 8 Block IIR-M and 16 Block IIF
satellites) in the constellation are broadcasting the new signal. Under
currently published plans, that is not expected to occur until 2013 or
beyond.
- The radio spectrum for the L2 signal is not fully protected through
the International Telecommunications Union. This means that L2C cannot be
relied upon for so-called safety of life applications such as in
civil aviation and emergency service operations. Therefore, a third civil
frequency at 1176.45MHz (called L5) is planned for launch on the Block IIF
satellites. The first Block IIF launch is scheduled for 2006, with full
operational capability unlikely until 2015.
- GPS-III, which will incorporate the extra L2 and L5 signals of the
Block IIR-M and Block IIF satellites, will have additional features (still
under study) which will enable it to better ‘compete’ with Galileo.
However, to preserve ‘backward compatibility’ with legacy user equipment,
all current and planned Block II signals will also be broadcast. The 30
GPS-III satellites are planned for launch from about 2013 until 2018.
3. FROM GPS TO GNSS
Perhaps the single most important shortcoming of GPS is also its most
obvious; there are some places where GPS simply does not work due to a lack
of available satellites. Therefore, while GPS Modernization will have a
significant impact, a major influence in the future will be systems offering
additional satellites to those offered by GPS alone. We may therefore think
in terms of a generic, overall GNSS combining a number of sub-systems.
3.1 GLONASS from Russia
GLONASS was originally deployed as the Soviet Union’s answer to GPS. The
design of GLONASS is very similar to GPS except that originally each
satellite broadcast its own particular frequency with the same codes. GPS
satellites broadcast the same frequencies and a receiver differentiates
between satellites by recognising the particular part of the codes broadcast
by a given satellite (this is known as a CDMA, or Code Division Multple
Access, scheme). GLONASS can also provide a different level of service to
Military users compared to Civilian users. For a detailed description of
GLONASS see UN Action Team on GNSS [2004]. Current status information is
available from the Russian Federation Ministry of Defense web site at
GLONASS [2005].
Since the collapse of the USSR, the Russian Federation has struggled to
find sufficient funds to maintain GLONASS and at the time of writing
(mid-2005) there are only 14 satellites functioning (as opposed to the 24
necessary for full operational capability). However, the Russian Federation
has recently commenced a program to revitalise GLONASS:
- Current activity centres on launching GLONASS-M satellites with an
improved 7-year design lifetime, which will broadcast in the L1 and L2
bands.
- From 2007 to 2008 it is planned to launch GLONASS-K satellites with
improved performance, which will also transmit a third civil signal (L3).
- The stated intention is to achieve a full 24-satellite constellation
transmitting two civil signals by 2010.
- The full constellation is planned to be broadcasting three sets of
civil signals by 2012.
- It is worth noting that at the end of 2004 the Indian Government
announced it would be contributing funds to assist Russia revitalise
GLONASS.
Survey-grade receivers capable of tracking both GPS and GLONASS have been
available for some time. These combined receivers have demonstrated a marked
improvement in reliability and availability in areas where satellite signals
can be obstructed, such as in urban areas, under tree canopies or in
open-cut mines.
3.2 The Quasi-Zenith Satellite System from Japan
The Quasi-Zenith Satellite System (QZSS) is a multi-satellite
augmentation system proposed to the Japanese government by a private
sector consortium. The plan is to launch at least three satellites
broadcasting GPS-like (and perhaps Galileo- and GLONASS-like) signals in an
orbital configuration that increases the number of satellites available at
high elevation angles over Japan (hence the term “quasi-zenith”). This would
benefit modified GPS receivers operating in areas with significant signal
obstructions such as urban canyons. It is expected that a demonstration QZSS
satellite will be launched in 2008. For a detailed description of QZSS see
UN Action Team on GNSS [2004] and Tsujine [2005]. The orbital configuration
of the QZSS constellation is such that the satellites will also pass over
parts of the Asia-Pacific region (the satellites must be launched into a
geostationary altitude). That will effectively increase the number of
satellites available to suitably equipped GPS users in that region.
3.3 Galileo from the European Union
Perhaps the most exciting impact on the future of GNSS is the decision by
the European Union to launch its Galileo project. For a detailed description
of Galileo see European Commission Directorate General Energy and Transport
[2005] and UN Action Team on GNSS [2004]. For the purposes of this paper,
the following points are relevant:
- The design calls for a constellation of 30 satellites in a similar
orbital configuration to GPS, but at an increased altitude (approximately
3000km higher than GPS) which will enable better signal availability at
high latitudes.
- While the Galileo design aims for a level of interoperability with
GPS, some aspects are not compatible.
- The exact signal structure has not been finalised but Galileo
satellites will broadcast signals compatible with the L1 and L5 GPS
signals. Those Galileo signals are designated as L1, E5a and E5b. Galileo
will also broadcast in a third frequency band at E6; which is not at the
same frequency as L2/L2C GPS.
- The details of the services from Galileo are subject to change but the
current plan is to offer 5 levels of service:
- The Open Service uses the basic signals, free-to-air to the
public with performance similar to GPS and GLONASS.
- The Safety of Life Service allows similar accuracy as the
Open Service but with increased guarantees of the service, including
improved integrity monitoring to warn users of any problems.
- The Public Regulated Service is aimed at public authorities
providing civil protection and security (eg police), with encrypted
access for users requiring a high level of performance and protection
against interference or jamming.
- The Search and Rescue Service is designed to enhance current
space-based services (such as COSPAS/SARSAT) by improving the time taken
to respond to alert messages from distress beacons.
- The Commercial Service allows for tailored solutions for
specific applications based on supplying better accuracy, improved
service guarantees and higher data rates.
- The Galileo ground segment has elements similar to the GPS global
network of tracking stations and its master control station.
- With GPS, under the firm control of the US Military, augmentation
systems to improve accuracy or reliability are operated completely
external to the GPS architecture. Such services are available from third
parties such as FUGRO’s Omnistar or the DGPS beacons provided by the US
Coast Guard and the Australian Maritime Safety Authority. Galileo, on the
other hand, has a much more open architecture, whereby systems to improve
service can be brought ‘inside’ the system through a provision for
regional elements and local elements. The Galileo system
architecture allows for regional Up-Link Stations to facilitate
those improved services tailored to local applications in certain parts of
the globe.
- Galileo is to be operated by a Civilian Agency and the
business-operating model is more open than in the case of GPS. Galileo
uses a Public Private Partnership (PPP) whereby the European Commission
owns the physical system (satellites, ground stations, etc) as a public
asset, but a Concessionaire will be responsible for the day-to-day
operation. The business model is still being developed, however the
Concessionaire will probably seek to cover costs and generate profit
through the Commercial Service, while also delivering agreed service
levels for the other four services. At the time of writing (mid-2005) the
two consortia previously bidding for the Galileo concession have joined
forces and have begun negotiations with the European Commission.
- Galileo has moved out of its development phase and into the In
Orbit Validation (IOV) phase. A contract has been let for the four
satellites required during the IOV phase, with the first launch expected
in late-2005 or early-2006.
- The full constellation should be launched between 2006 and 2008, with
full operational capability by 2009, though these dates may slip a year or
two.
4. THE PROMISE OF A BROADER GNSS
It can be seen from the above descriptions that the next generation GNSS
will bring significant improvements compared to the currently available
systems. In ten years time there may be as many as 80 satellites from GPS,
GLONASS, Galileo and QZSS, broadcasting a variety of signals and codes,
which can be used by suitably equipped users anywhere on the globe for a
range of navigation and positioning applications. QZSS will also add three
or more satellites for users in the Asia Pacific region. The L1 signal alone
is sufficient for many mass-market applications requiring an accuracy of
(say) 3 to 10 metres. The availability of many more satellites will enable
new applications in areas where the current lack of satellites has been a
hindrance to market growth.
4.1 More Satellites Available for Users
A global snapshot of the satellite visibilities for GPS-only, combined
GPS/GLONASS, combined GPS/Galileo and combined GPS/GLONASS/Galileo scenarios
are presented in Figure 1. The global simulation was carried out by
computing single-epoch snapshot solutions for 1200h on 27 May 2005 at 1
degree intervals of latitude and longitude, and an altitude of 50m, using a
15° masking angle. Orthographic global colour maps are ideal for displaying
spatial variations. The average satellite visibilities, excluding the high
latitude areas, are approximately 6, 12, 15 and 21 for GPS, GPS/GLONASS,
GPS/Galileo and GPS/GLONASS/Galileo scenarios respectively. The visibility
improvements of the combined systems with respect to GPS-only are therefore
approximately 200%, 250% and 350% for GPS/GLONASS, GPS/Galileo and
GPS/GLONASS/Galileo respectively.
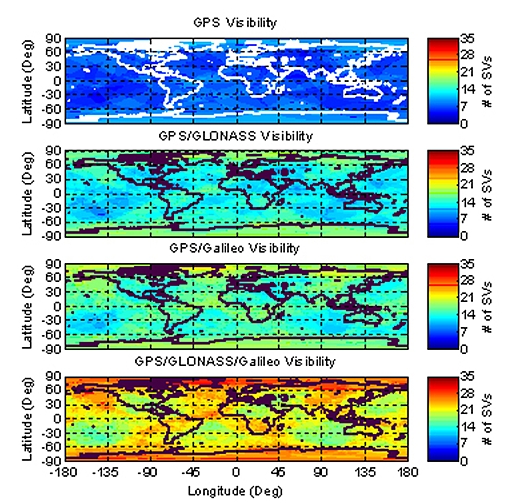
Figure 1. Global snapshot of satellite visibility
with 15° masking angle (1200h 27 May 2005).
4.2 The Benefits of More Satellites
GPS and GLONASS combined have already demonstrated the benefits of extra
satellites, and Galileo brings all that and more. The benefits of the
expected extra satellites and their signals outlined above can be
categorised in terms of continuity, accuracy, efficiency, availability and
reliability.
Extra satellites improve continuity:
- GPS, QZSS and Galileo being independent GNSS means major system
problems, unlikely as they are, are a very remote possibility of occurring
simultaneously.
Extra satellites and signals can improve accuracy:
- More satellites to observe means a given level of accuracy can be
achieved sooner.
- More signals means more measurements can be processed by the
receiver’s positioning algorithm.
- Position accuracy is less susceptible to the influence of satellite
geometry.
- The effects of multipath and interference/jamming are mitigated,
meaning the measurement quality is higher.
- Galileo also has the ability to deliver improved DGNSS accuracy
directly, in the receiver via the RF frontend, through the Commercial
Service.
Extra satellites and signals can improve efficiency:
- For carrier phase-based positioning, to centimetre accuracy, the extra
satellite signals will significantly reduce the time required to resolve
ambiguities.
Extra satellites and signals can improve availability (of
satellites at a particular location):
- Improved ability to work in areas where satellite signals can be
obscured, such as in urban canyons, under tree canopies, open-cut mines,
etc.
- A ‘hot’ research topic is indoor GNSS. Some receivers are now
capable of measuring GPS signals inside buildings, and an increase in the
number of available satellites will make indoor positioning more robust.
Extra satellites and signals can improve reliability:
- With extra measurements the data redundancy is increased, which helps
identify any measurement outlier problems. The new measurements will be
more independent than the current L1 and L2 measurements, because
code-correlation techniques (based on a knowledge of the PRN modulating
range codes) will be used, rather than the current
‘codeless/cross-correlation’ techniques employed in today’s dual-frequency
GPS receivers.
- The current L2 GPS measurements by survey-grade receivers are more
noisy and less continuous than those expected to be made on either of the
new signals L2C or L5, hence reliable dual-frequency operation will be
enhanced.
- More signals means that service is not as easily denied due to
interference or jamming of one frequency, that may prevent the making of
critical pseudorange and/or carrier phase measurements.
It should also be emphasised that newer systems, with improved
electronics and antennas in the satellites and user receivers, will deliver
overall improvements in data quality. One unknown factor, however, is
whether the new multi-frequency user receiver antenna will have the phase
centre stability of the current Dorne-Margolin antennas used by the
International GNSS Service (IGS).
4.3 Positioning Capability will become Ubiquitous
There are factors other than just having more satellites that will
influence future market growth in devices and services that require
positioning/navigation. One important issue is the USA’s E911 policy, and
its equivalent in Europe. These introduce a legal requirement that a
mobilephone making an emergency call must be capable of being positioned
(typically to better than 100m accuracy). This is leading to many next
generation mobilephones being equipped with a GNSS capability. An increased
availability of GNSS satellites, along with position-capable
mobilephones and personal devices, are enabling factors for a predicted boom
in so-called location based services. That in turn is driving the
development of a range of positioning technologies that can also work inside
buildings, hence indoor positioning is a hot topic for research. GNSS is but
one technology being touted as the ideal seamless indoor/outdoor
positioning system [Rizos, 2005]. All of these factors combined means we
are likely to see positioning capability moving from specialised markets
such as navigation, surveying and mapping, to something much more available
to the general public. In short, position capability is likely to become
much more ubiquitous during the coming decade.
4.4 The Lack of Uniform Compatibility
However, there are also some GNSS issues that will complicate how both
the location based services markets and the traditional
surveying/geodesy/mapping markets progress. Apart from the low-end
requirements of the LBS mass market, specialised applications will require
the availability of multiple GNSS frequencies for improved performance. They
also require as many satellites as possible delivering the improved
capability at any time and in any location. In that context it is important
to note that there will not be uniform compatibility across all the GNSS
sub-systems in terms of the signals broadcast, and the timing of when new
capabilities become available.
In relation to signal compatibility, there will only be subsets of the
possible 80 satellites broadcasting a second signal at the same frequency.
The combinations for multiple signals are:
- GPS and QZSS – L1, L2, L5
- GLONASS – L1, L2, L3
- Galileo – L1, E5, E6
- GPS, QZSS, GLONASS – L1, L2
- GPS, QZSS, Galileo – L1, L5/E5 (this is the only combination suitable
for safety-of-life applications)
Considering the timing of when new capabilities will become available, it
is important to note that the currently stated time frames for GPS
Modernization, GLONASS replenishment, and QZSS and Galileo deployment are
not synchronised.
4.5 The Expansion of High Accuracy Applications into the Mass Market
Current state-of-the-art techniques in GPS Surveying squeeze
centimetre accuracy from the least possible amount of data from the
reference and rover receivers in real-time, using all satellites in view and
observations of pseudorange and carrier phase on the two L-band frequencies
(L1 and L2). Therefore, GPS is already a very good tool for high accuracy
applications. In fact to date GPS surveying techniques have concentrated on
achieving the best possible accuracy. The advantages from the coming
developments to GNSS sub-systems outlined above is that the spotlight will
be on improved availability, efficiency and reliability.
The future of high accuracy GNSS must recognise the following issues:
- Experience with real-time GPS surveying shows that performance
improves when more satellites are available.
- Extra signals are not only useful for ionospheric correction; they
also increase the number of observations available for ambiguity
resolution, which delivers high accuracy sooner and with greater
reliability. Therefore, dual-frequency measurements have proved very
useful in GPS surveying, hence being able to use three frequencies will
increase performance even more.
- Any extra signals carrying a civilian code can be accessed by less
complicated receivers than is currently the case. This should lead
to a new generation of less expensive receivers capable of delivering high
accuracy.
- The techniques employed in real-time GPS surveying are already
addressing other applications, including the field of machine guidance
servicing construction, mining and agriculture. These industries have high
marginal costs and therefore require high levels of reliability and very
robust solutions.
Therefore, the holy grail for future high accuracy GNSS applications is
to have the maximum number of satellites, broadcasting the maximum number of
signals, being tracked by the least expensive receivers, delivering the most
robust solution. The future is impossible to predict with any certainty, but
the following are ‘snapshots’ (at five-year intervals) of how high accuracy
applications may develop.
Today, 2005:
- All GPS receivers measure the carrier phase on L1 easily, but use more
complex and less optimal ‘codeless / cross-correlation’ signal processing
techniques to track the L2 frequency. Some are able to track L2C once
satellites are available.
- Two companies offer receivers that can track both GPS and GLONASS
signals. These offer higher availability in difficult environments where
there are signal obstructions, as in deep opn-cut mines.
2010:
- There could be GPS-only receivers measuring the carrier phase on L1,
codeless L2 plus L2C and L5 when satellites are available.
- Galileo-only receivers measuring the carrier phase on L1, E5 and E6
from a full, or near full, constellation.
- ‘Hybrid’ receivers that are primarily GPS receivers measuring the
carrier phase on L1, codeless L2 plus L2C and L5 (when satellites are
available), but can also make measurements on the compatible Galileo L1
and E5 signals.
- ‘Hybrid’ receivers that are primarily Galileo receivers measuring the
carrier phase on L1, E5 and E6, but can also make measurements on the
compatible GPS L1 and L5 signals.
- True GNSS receivers measuring the carrier phase on all available GPS
and Galileo signals.
- For hybrid receivers it should be noted that in 2010 there might be
more Galileo satellites broadcasting E5 than GPS satellites broadcasting
L5.
- Some hybrid receivers may also be able to track the GLONASS and/or
QZSS signals when available.
- The hybrid receivers will be capable of superior performance compared
to receivers using only a single sub-system.
- However, it is unclear whether there will be a charge on receivers
making measurements on the Galileo E6 signals.
- This wide range of possibilities will cause uncertainty for high
accuracy users as different receiver configurations ‘jockey’ for market
dominance.
2015:
- By 2015, GPS should have caught up to Galileo and have a full
constellation broadcasting L1, L2C and L5 signals. Some next generation
GPS-III satellites will have also been launched.
- Galileo will continue to offer a full constellation broadcasting L1,
E5 and E6 signals. Second-generation Galileo satellites, possibly with
improved capabilities, may have replaced some of the original satellites.
- There will be a combined GPS and Galileo constellation of at least 54
satellites (most likely 60 or so). 10 satellites being available anywhere
on the globe at any time will be common place.
- The market uncertainties in the preceding 10 years should have panned
out by 2015 and true GNSS receivers will probably be measuring the carrier
phase on most, if not all, of the available GPS and Galileo signals.
- With full coverage of GPS L2C, the need to measure codeless L2 will
have passed, and receivers will have simplified signal tracking
technology.
- This should lead to low-cost receivers measuring carrier phase from
the combined GPS/Galileo constellation.
- When GLONASS and/or QZSS satellites are in view, capability will be
further enhanced.
- The high availability of GNSS signals and the signal protection for L1
and L5 will mean that high accuracy can be relied upon, even for safety of
life applications.
- Integration with other technologies will mean that indoor positioning
will be mature and robust.
- A users’ positioning data will be easily combined with correction data
from reference stations delivered either by third party mobile
communications or directly into the receiver by the Galileo commercial
service.
All of this will see a continuation of the trend that began around 2000
for high accuracy positioning applications to move from surveying into other
high value and mission critical markets such as machine guidance. By 2015,
the days when high accuracy positioning capabilities were the exclusive
domain of surveyors will have passed. The ability to position everywhere
with decimetre, and even centimetre, accuracy will be widely available and
affordable. Therefore, it is likely that by 2015 mass-market location-based
services based on high accuracy positioning will be common place.
5. THE IMPLICATIONS OF A BROADER GNSS
The new GNSS capabilities outlined above will have significant impacts on
the spatial information industry. Current GNSS reference station
infrastructure will obviously be impacted, but there may also be wider
implications for providers and users of the Spatial Data Infrastructure.
5.1 Implications for Providers of Continuously Operating Reference
Stations for GNSS
The growing importance of satellite positioning as an enabling technology
across many industries has led to a realisation that Continuously Operating
Reference Stations (CORS) are an important part of the infrastructure for
the spatial sciences. The establishment of the International GNSS Service
(IGS) in 1992 was a significant step toward the provision of such
infrastructure on a global basis. The 1990s also saw the introduction of
DGPS services to overcome the U.S. policy of Selective Availability,
that deliberately degraded the point positioning accuracy available to
civilian GPS users. Some augmentation services using CORS are aimed at
commercial users generally while others are designed for particular sectors
such as maritime or civil aviation users. More recently, public sector
organisations responsible for surveying and mapping infrastructure across
the globe have begun to establish CORS networks and services to support
real-time centimetre accuracy positioning.
Working from the international through to the local scene, there are
various levels of CORS providers:
- The International GNSS Service (IGS);
- Space Based Augmentation Services (SBAS): U.S.’ WAAS, Europe’s EGNOS,
Japan’s MSAS and India’s GAGAN;
- Ground Based Augmentation Services such as the GRAS service being
developed by Airservices Australia;
- DGPS beacons such as those provided by the US Coast Guard and the
Australian Maritime Safety Authority;
- Commercial services from global companies like Fugro’s OMNISTAR,
Navcom’s Starfire, or more localised services; and
- Networks supporting high accuracy real-time applications; such as
SAPOS in Germany and many similar networks around the globe.
The GNSS developments outlined in this paper are of particular interest
to all of these CORS providers. It is too early to predict exactly how CORS
providers will be affected, but the following questions will need to be
addressed eventually:
- When will be the right time to move from a CORS network predominantly
based on GPS to one covering multiple GNSS sub-systems?
- How will the market for combined GNSS receivers develop and what
services will CORS networks need to provide to service that market?
As with any infrastructure development, the institutional arrangements
are likely to be even more problematic than the technological issues. The
following two issues need to considered:
- Firstly, current CORS providers are distinguished by the varying
levels of service they provide. These distinguishing characteristics will
be less obvious as CORS users demand increasing levels of accuracy and
reliability. By 2010 it is likely that CORS services will need to deliver
the accuracy currently demanded by surveyors AND the reliability currently
demanded by safety-of-life users.
- Secondly, the ability to run a GPS-based CORS network is now well
understood with off the shelf hardware and software widely
available. With Galileo however, the Concessionaire will have access to
the knowledge required to build Galileo reference stations long before
such knowledge is available in the public domain. That would enable the
Concessionaire to have a significant advantage when it comes to providing
services using both GPS and Galileo.
These two points lead to a need for much greater collaboration among
current CORS providers and a need to account for a major new player in the
field of GNSS services: the Galileo Concessionaire.
5.2 Implications for Users and Providers of Spatial Data Infrastructure
It is important for the spatial information industry to look beyond just
being directly involved in GNSS services and to consider the wider
implications for providers and users of the Spatial Data Infrastructure
(SDI).
Compatibility between SDI data sets and GNSS
Delivering the full advantage of GNSS requires a compatible and
homogeneous geodetic infrastructure underpinning all SDI. Many developed
countries have adopted datums based on the International Terrestrial
Reference Frame (ITRF) that are compatible with GNSS. An example is the
adoption of the Geocentric Datum of Australia (GDA), which has been an
important initiative for GNSS campatibility. Many areas of the world
(especially developing countries) are not so well prepared and a suitable
geodetic infrastructure is still not available. However, the IGS does have a
global infrastructure in place to help propagate the International
Terrestrial Reference Frame to such countries.
In many areas even the most recently established datums are fixed in time
(in terms of plate tectonics), as for example the GDA. This will become
problematic when users are able to position themselves with an accuracy
equivalent to a few years of the motion of the underlying tectonic plate
(typically several centimetres per year).
Establishing a GNSS-compatible datum is only the beginning. If
applications such as location-based services are to thrive, it is important
that all major spatial data sets are moved onto that datum in a way that
maintains the accuracy of the original spatial data set.
These issues are becoming important for applications outside SDI’s
traditional sphere of influence that are reliant on GNSS and require a
seamless geodetic reference frame across the data sets they use. Some
applications will be for very demanding users of the SDI, especially
safety-of-life applications like Civil Aviation, Emergency Services and
Disaster Management.
This leads to a requirement for the providers of SDI around the world
(like National Mapping Organisations) to make their geodetic infrastructure
and other foundation data sets more compatible and reliable in order to
service increasingly demanding GNSS users. Liaison with national neighbours
and international associations will be needed to make this a reality. The
AFREF Project aimed at a GNSS-compatible and homogeneous geodetic
infrastructure for the African continent is shaping up as an excellent
example of a framework for such regional cooperation.
Ubiquity of Positioning
As mentioned earlier in this paper, the next generation of GNSS will
greatly enhance the accuracy and reliability of the positioning task.
Integration of other measurements and sensors will also lead to the
development of indoor positioning capabilities. Ubiquitous positioning will
be combined with high bandwidth mobile communications and increasingly
intelligent spatial analysis tools.
The SDI in all its aspects will need to support a rapidly expanding
number of users needing to analyse increasingly sophisticated specialist
data sets, in combination with traditional foundation SDI data sets.
Furthermore, users will expect it all to work in real-time on small mobile
devices.
Accuracy and Reliability Improvements
Perhaps the most pressing issue in relation to SDI is that users will
soon be able to position themselves with better accuracy than can be found
in many SDI foundation data sets.
By 2010, developments such as Galileo’s Commercial Service will be
routinely delivering 0.1 metre accuracy directly to users in their handheld
receivers. At the same time we will also see centimetre accuracy
applications move into mainstream mass-markets. We could see centimetre
accuracy location-based services such as real-time engineering design. The
accuracy and reliability required in safety-of-life applications could be
transferred from aircraft to trains, trucks, buses and cars. It may soon be
possible for spatial data and accurate positioning to be brought to bear on
reducing road toll.
However, issues such as spatial accuracy, data access and institutional
arrangements will need to be overhauled before the SDI can support users of
location-based services demanding such high standards of accuracy and
reliability.
6. CONCLUDING REMARKS
The spatial information industry industry has been revolutionised by the
use of Global Navigation Satellite Systems. The Global Positioning System is
the only currently fully operational GNSS, although Russia also operates its
own GNSS. Fuelling growth in the coming decade will be next generation GNSS,
and space augmentations of these, that are currently being developed. The
USA is modernizing GPS, Russia is revitalising GLONASS, and Europe is moving
ahead with its own Galileo system. The first part of the paper outlined how
the next generation of GNSS will bring extra satellites and signals to
deliver better accuracy, reliability and availability. Extra satellites will
make possible improved performance for all applications, and especially
where satellite signals can be obscured, such as in urban canyons, under
tree canopies or in open-cut mines. In its various modes, modernized GNSS
will also deliver higher accuracy and improved speed-to-first-fix for
carrier phase-based positioning. The second part of the paper discussed some
of the implications of these improvements for the service providers of
continuously operating reference stations, for the underlying Spatial Data
Infrastructure, as well as for survey users as the market for high accuracy
positioning expands into new location-based services.
REFERENCES
- Communications Research Laboratory (2004), “Quasi-Zenith Satellite
System - A new Satellite Positioning System of Japan”, Proceedings of 16th
Meeting of CCTF, Tokyo, Japan, 1-2 April,
http://www.bipm.fr/cc/CCTF/Allowed/16/cctf04-11.pdf. Web site accessed
29 July 2005.
- Dinwiddy, S.E, Breeuwer, E. & Hahn, J.H. (2004), “The Galileo System”,
Proceedings of the European Navigation Conference GNSS 2004, Rotterdam,
Netherlands, 16-19 May, 151:1-5.
- European Commission and European Space Agency (2002) Galileo Mission
High Level Mission Definition Version 3.0.
http://europa.eu.int/comm/dgs/energy_transport/galileo/documents/technical_en.htm.
Web site accessed 27 July 2005.
- European Commission (2005), GALILEO - European Satellite Navigation
System
http://europa.eu.int/comm/dgs/energy_transport/galileo/. Web site
accessed 13 July 2005.
- Coordinational Scientific Information Center, Russian Federation,
Ministry of Defense (2002) GLONASS Interface and Control Document Version
5.0,
http://www.glonass-center.ru/public_e.html
- Lee, H.K., Wang, J., Rizos, C., Barnes, J., Tsujii, T., & Soon, B.K.H.
(2002), “Analysis of Pseudolite Augmentation for GPS Airborne
Application”, Proceedings 15th Int. Tech. Meeting of the Satellite
Division of the U.S. Inst. of Navigation, Portland, Oregon, 24-27
September, 2610-2618.
- Rizos, C. (2005), “Trends in Geopositioning for LBS, Navigation and
Mapping”, Proceedings of Int. Symp. & Exhibition on Geoinformation 2005,
Penang, Malaysia, 27-29 September,
http://www.gmat.unsw.edu.au/snap/publications/rizos_2005b.pdf. Web
site accessed 23 July 2005.
- Russian Federation Ministry of Defense (2005), General GLONASS,
http://www.glonass-center.ru/frame_e.html. Web site accessed 13 July
2005.
- Tsujino, T. (2005), “Effectiveness of the Quasi-Zenith Satellite
System in Ubiquitous Positioning”, Science & Technology Trends, Quarterly
Review No. 16,
http://www.nistep.go.jp/achiev/ftx/eng/stfc/stt016e/qr16pdf/STTqr1607.pdf.
Web site accessed 29 July 2005.
- UN Action Team on GNSS (2004), Report of the Action Team on Global
Navigation Satellite System (GNSS): Follow-up to the Third United Nations
Conference on the Exploration and Peaceful Uses of Outer Space (UNISPACE
III), Office for Outer Space Affairs, United Nations Office at Vienna.
(United Nations Publications, Sales no. E.05.1.3) ISBN: 92-1-100955-3
- US Coast Guard Navigation Center (2005), GPS Modernization,
http://www.navcen.uscg.gov/gps/modernization/default.htm. Web site
accessed 13 July 2005.
BIOGRAPHICAL NOTES
Chris Rizos and S. Hewitson are working at the School of
Surveying & Spatial Information Systems, The University of New South Wales
in Sydney, New South Wales, Australia. Prof. Chris Rizos is Chair of IAG
Commission 4 “Positioning and Applications”.
Matthew B. Higgins is working at the Survey Infrastructure
Services, Department of Natural Resources and Mines in Brisbane, Queensland,
Australia. Matt is Chair of FIG Commission 5 “Positioning and Measurement”
CONTACTS
Prof. Chris Rizos
School of Surveying and Spatial Information Systems
The University of New South Wales
Sydney
AUSTRALIA
Tel + 61 2 9385 4205
Fax + 61 2 9313 7493
Email: c.rizos@unsw.edu.au
Web site:
http://www.gmat.unsw.edu.au/snap/snap.htm
Mr. Matt Higgins, Senior Surveyor
Dept of Natural Resources and Mines
Locked Bag 40
Coorparoo Delivery Centre
Brisbane Qld 4151
AUSTRALIA
Tel. + 61 7 3896 3754
Fax + 61 7 3891 5168
E-mail:
matt.higgins@derm.qld.gov.au
 |






















